
「離陸から着陸まで、どの様に飛行ルートを運航するのですか?」と言うご質問を受けました。
ご質問の内容は以下の通りです。
・・・・・ここから・・・・・
「滑走路を離れ上昇し、航路までの進路の取り方(上昇して何フィートで進路何度に機首を取るとか)
また、到着空港が近づいてから滑走路にどの様に近づくのかが知りたいです。
(どの辺で降下し、どの辺で機体を旋回させ最後に滑走路に対してどうやって真正面に進入するとか)
出来ましたら、手動でやるのとGPSが普及する前の手順そして現在の最新の運航システムでのオペレーションを何回かに分けても構いませんので教えて頂けませんか?
地面を走っているわけでもないのに、正確にそこを通り、どこの地点で曲がるのかが不思議なのです。
もし、最新の電子機器が故障した場合に全ては自分で機体の位置を確認し方角を決めなければ、ならないのでしょうから、どういった勉強をされてきたのかも知りたいです。
乗っている客としてもイメージで自分が操縦している気分を味わたいものです(笑)
とても興味があるので、ご面倒で申し訳御座いません。お時間が御座いましたら連載をお願い致します。 」
・・・・・ここまで・・・・・
ありがとうございます。
それでは少し長くなりますがご説明いたします。
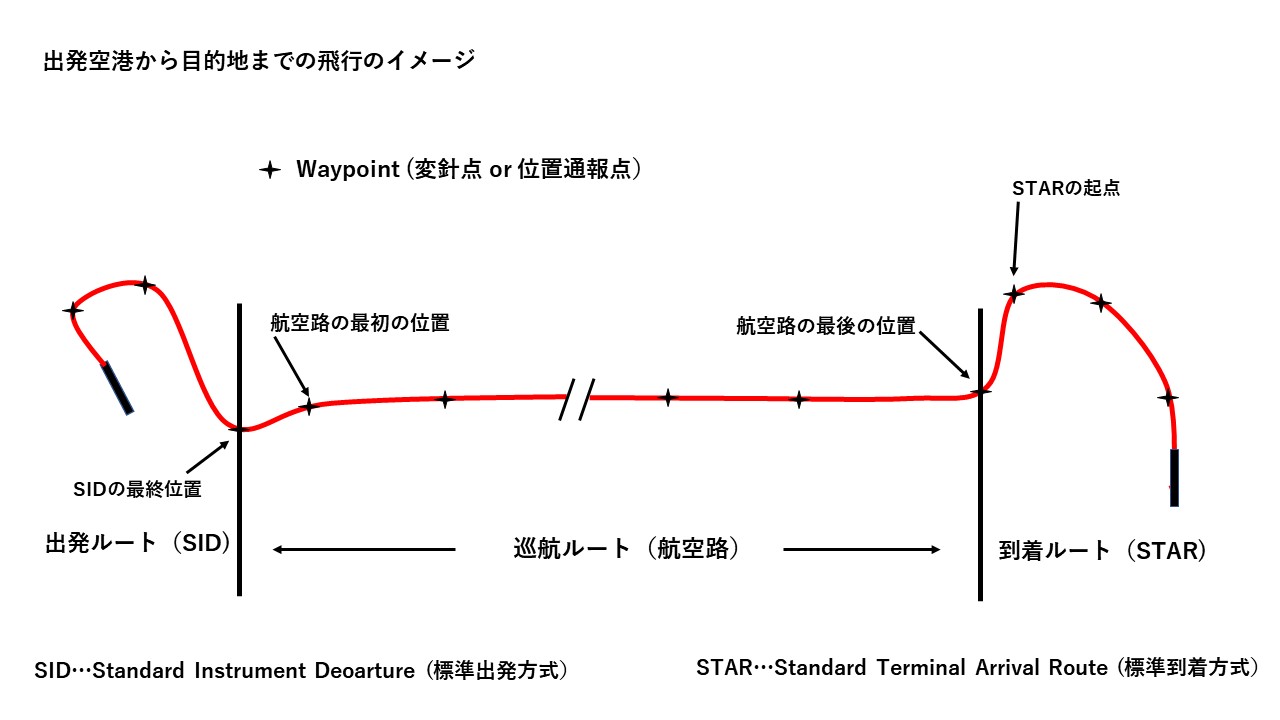
飛行ルートは大きく3つの部分に分けられる
出発ルート、巡航ルート、到着ルート
また上記ルート間を結ぶ転移ルートがある場合があります。
まず各ルートを説明する前に現在の旅客機の飛行方法はどのように行っているか説明したいと思います。
現在エアライン行われている飛行方法(航法)とは・・・?
昔、地上においてはVOR(VHF Omni-Directional Range)やNDB(Non-Directional Beacon)と言った地上の航法援助施設を結んだ航空路が設定されていました。
現在もVOR間を結んだ航空路も存在して実際に使われていますが、今のエアラインの航法の主役はFMS(Flight Management System)を使用したRNAV(アールナブ、AREA Navigation・・・広域航法)が主流になっています。
RNAVとは緯度、経度で設定したWay Pointと言う位置通報点を結んだ航空路を飛行する方式です。
FMSは自律航法装置(地上設備が必要なく飛行機に搭載された機器のみで航法が出来る装置)の一種のIRS(Inertial Reference System)と呼ばれる慣性航法装置(加速度を検出して自機の位置を測定する装置)とGPSを使用しています。
慣性航法装置単独では飛行時間が長ければ長いほどエラーが蓄積し、誤差が大きくなるという欠点がありました。
しかし慣性航法装置にGPSの自機のデータを併用する事により極めて正確な航法が出来るようになりました。
どの位正確かと言いますと太平洋の真ん中で同じ航空路を飛んでいる飛行機とすれ違う場合、ほぼ真正面に飛行機が現れます。
誤差数メートルです。
このFMS(慣性航法装置+GPS)は飛行機に3台搭載しており、各々が独立したシステムになっています。
実はこの装置がすべて故障する事は想定されていません。
ただ長距離飛行の場合(太平洋横断等)、あるPosition(航法援助システムが使える範囲内)を通過する前に1台故障した場合には万が一のために引き返すと言う決まりはあります。
万が一、3台故障した場合でも航法援助システム(VOR等)が使える場合は問題なく飛行できますし、太平洋の真ん中であっても正確な航法はできませんが、方角は他の手段で分かりますので心配はありません。
VOR間で航空路を設定する場合は地上設備を使いますので必然的にジグザグなコースになりますが、RNAVの場合は緯度、経度で任意の地点を設定できますので直線的なコースの設定が可能になり、飛行効率が大幅に改善されました。
現在の旅客機では離陸後の出発経路から着陸に至る到着経路までRNAVで飛行していると言っても過言ではありません。
以下は離陸から着陸までの飛行のイメージです。(クリックすると拡大します。)
前置きが長くなりましたが、それでは離陸から順に旅客機はどのように飛行しているか説明したいと思います。
離陸から出発ルートへ
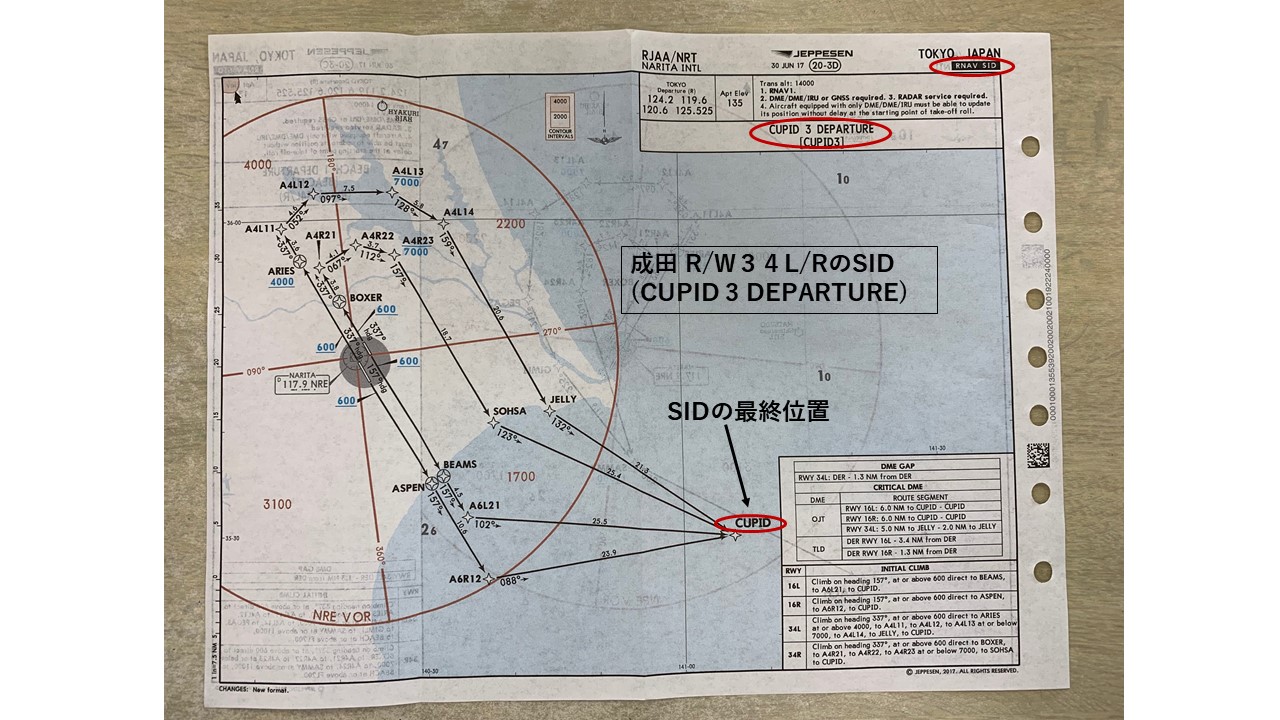
出発方式は各空港の滑走路毎に個別のSID(Standard Instrument Departure)と呼ばれるルートが設定されています。
たとえば成田であれば各R/Wに対して方向別に出発方式が設定されています。
北西方向(ヨーロッパ方面)であればJYOSO 7 Deaprture、太平洋方面であればCUPID 3 Deaprture、東南アジア方面であればTETRA 6 Departureといった具合に13種類くらいあります。
ちなみに上記の7とか3とか6と言う数字はSIDの変更があった場合に順につけられる数字です。
JYOSO 7 Deaprtureであればこれまでに7回変更があったという事です。
この数字を付けることによって誤って古いChartを使用する事がないようにしています。
離陸後、SIDに定められたコース、及び高度制限を守りながら指定された最終のPosition、たとえばCUPID3DeaprtureであればCUPIDと呼ばれているところまで飛行します。
以下は成田のCUPID 3 Deaprtureです。(クリックすると拡大します。)
具体的な手順を説明します。
離陸前にパイロットはFMSの機能のLNAV(エルナブ・・・Lateral Navigation)とVNAV(ブイナブ・・・Vertical Navigation)をArm(アーム)にします。
Armと言うのは離陸後ある条件が整うと自動的にそのシステムが作動する様にすることです。
LNAVと言うのは横(水平)方向の航法・・・車で言えば道路の様なもの、VNAVと言うのは縦(垂直)方向、高度に関する航法を意味します。
離陸直後、LNAVとVNAVがCapture(接続)され離陸前に設定したSIDのルートを飛行する様に飛行機はコントロールされます。
旋回開始は各SIDによって違います。
またSIDの中のあるPostionに高度制限がつくこともあります。
操縦計器のND(Navigation Display・・・航法用のモニター)には設定されたSIDルートがMagenta(マジェンタ・・・赤紫色)で表示されます。
この先飛行機は飛行前に設定したMagenta(赤紫色)の線で表示された出発ルート、巡航ルート、到着ルートのコースを目的地までたどって行くことになります。
画像は出発地から目的までの飛行のイメージです。
出発ルートから巡航ルートへ
巡航ルートは航空路と呼ばれています。
出発ルート(SID)に指定されている最終位置(上記で言えばCUPID)から各方面の航空路の最初のPositionや途中のPositionへ飛行します。
飛ぶ地域によって航空路には特徴がある
国内線のルートは台風などの影響で一部ルートを変更する場合がありますが、それぞれの目的地毎に決まったルートを毎日飛んでいる事がほとんどです。
FMSに例えば「HNDSPK1」と入力すると羽田から千歳までのルートが自動的に航法システムに入力されます。
東南アジアも国内線と同じで同じコースを飛ぶことが多いのですが、国内線より距離が長いために途中の天候(積乱雲の状況)や風の状況によってコースを変える時もあります。
アメリカ西海岸への飛行ルートは運航者の要望、気象状況、風、空域の運用状況等を勘案した上で一日単位で航空路が設定されます。
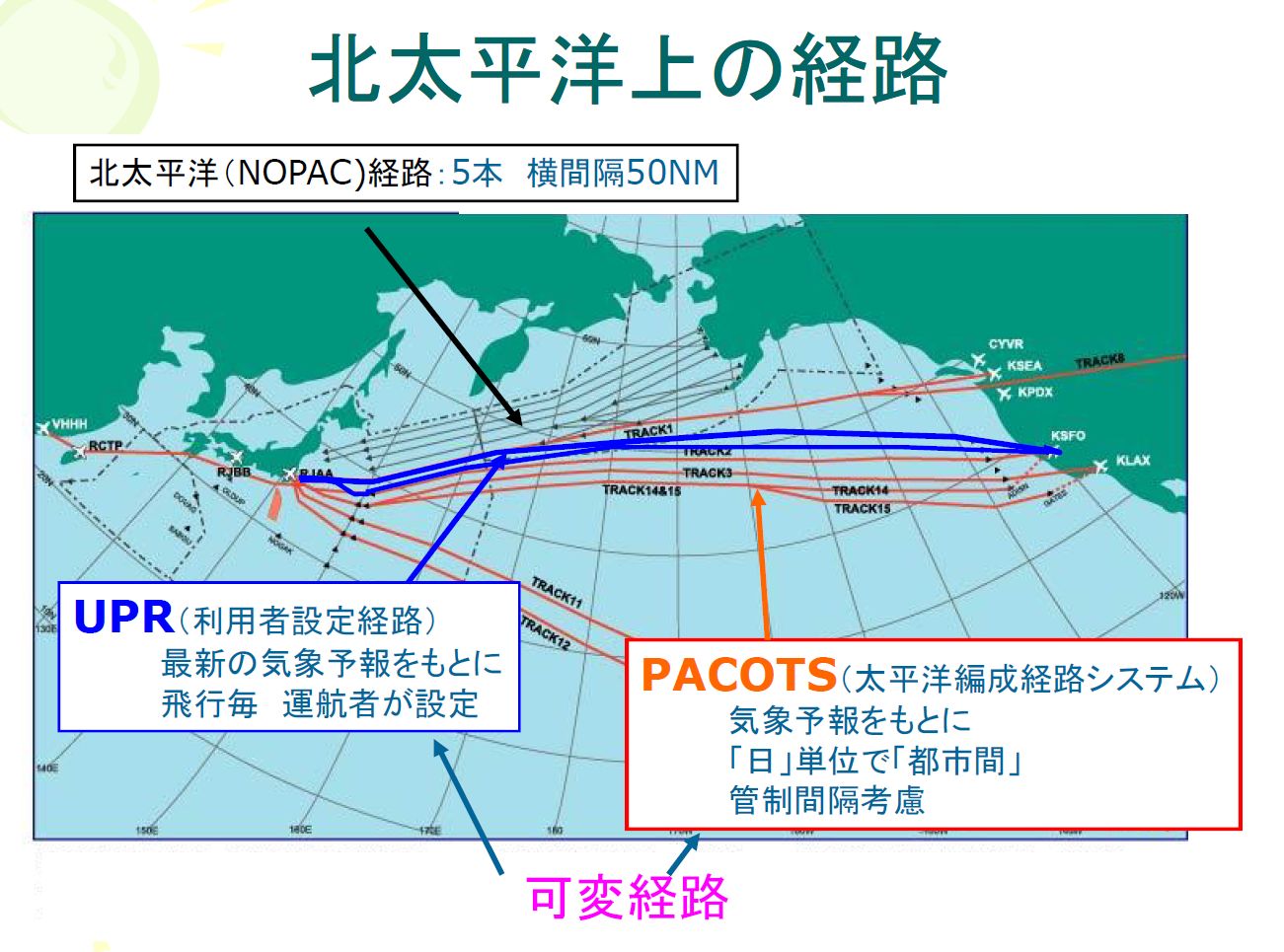
以前、記事にしましたが太平洋ルートでは行きはジェット気流の追い風に乗るように、帰りは逆に向かい風の弱い区域を選んで飛行します。(太平洋上空では基本的に偏西風と言う西風が卓越しています。)
北側のアリューシャン列島、アンカレッジ近辺を経由したNOPAC Route(ノパックルート)と言うコースとPACOTS(パコッツ Pacific Organized Track System:太平洋編成経路システム)があります。
画像はNOPAC RouteとPACOTSです。(クリックすると拡大します。)
ヨーロッパ行のシベリアルートも数本の決められたルートがありますが、風や気象の状況によってルートが決められています。
航空路から到着ルートへ
各航空路の最終位置のあとはSTAR(Standard Terminal Arrival Route)と言う到着方式によって空港の近くまで行くことになります。
滑走路に正対するまでSTARに沿って飛行する事もありますが、幹線空港では多くの場合STARの途中からレーダーベクターにより滑走路に正対するまで管制官により方向と高度が指示されることになります。
レーダーベクターと言うのは管制官が航空管制用レーダーを見ながら飛行機を誘導する事です。
降下は各STARの一定のPositionに高度制限がつくことが多いのでその高度制限を満たすTimingで開始する事が多いです。
以下は成田のABBOT NORTH ARRIVALです。(クリックすると拡大します。)
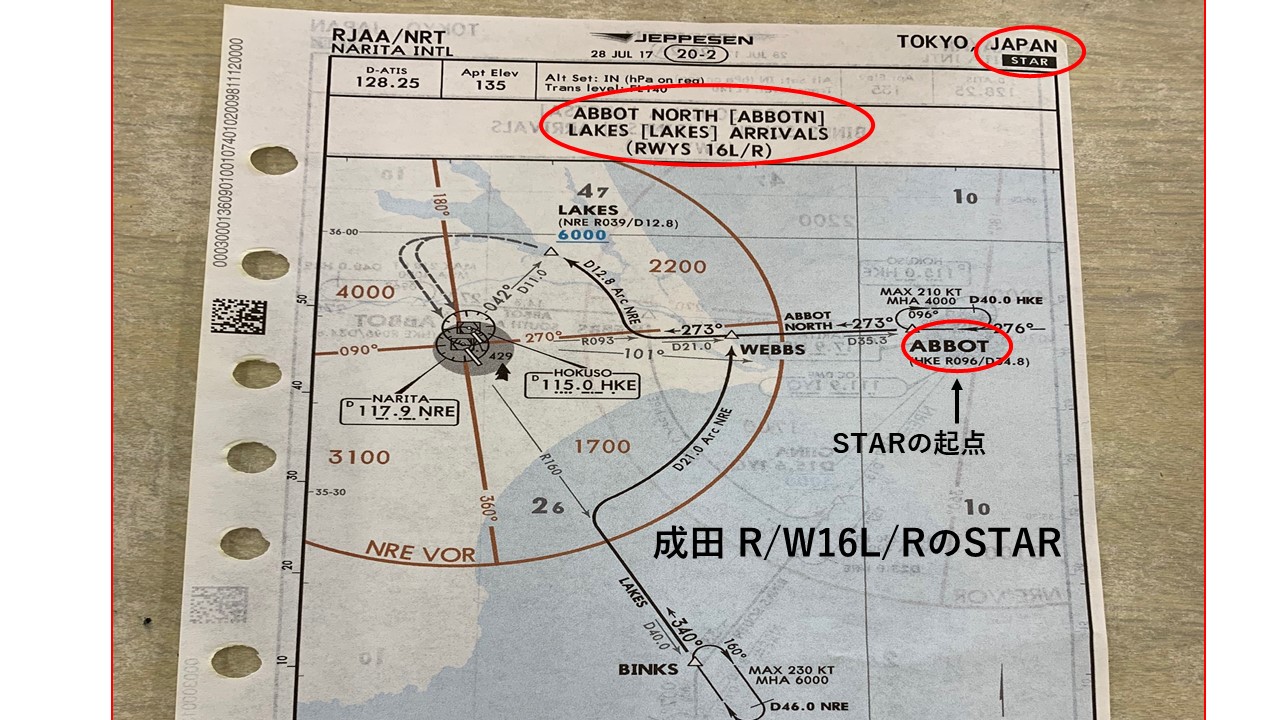
上記のSTARの例で降下のTimingを考えてみます。
例えば37000ftで巡航しており、ABBOTを10000ftで通過する場合、ABBOTまでに27000ft降下すればよいので降下率が毎分2000ftとするとABBOTの約13.5分前に降下を開始すればよいという事になります。
降下開始時のABBOTまでの距離は風によって変化します。
追い風の場合はGS(グランドスピード・・・地上に対する速度)が速くなりますので距離は多めで、向かい風の時は逆になります。
その後滑走路へはILS(Instrument Landing System)、もしくは滑走路を視認しながら進入します。
以上が旅客機の離陸から着陸までの概要です。
(画像はクリックすると拡大します。)

飛行機の航法手段の歴史
洋上の航法は時代によって変化してきました。
簡単に説明いたします。
最初、DC-6Bや初期のDC8の飛行機はナビゲーターが乗務していて天測(天体観測)を行いながら飛行していました。
さすがに私はこの時代の航法の経験はありませんが、DC8のCockpit(操縦室)の天井に天測用の機械を取り付ける穴が設置されているのを覚えています。
次にドップラー航法と言う飛行中の航空機から電波を発信し,返ってくる電波の周波数の変化により対地速度や偏流角を測定し地表に対する機体の位置を連続的に知ることができるシステムを使用していました。
(ドップラー効果を使います。)
誤差が大きいためロランと言う2局の電波を使用して機位を測定したり、VORのような地上援助施設が使える場合はその距離と方位で正しい機位を測定してその誤差を補正していました。
その次に出てきたのはINS(Inertial Navigation System)と言う慣性航法装置で、これは既述した通り検出した飛行機の加速度を基に自分の位置を求めるものです。
上記システムはドップラー航法に比べるとかなり正確になりましたが、長い時間を飛行するとやはり誤差が蓄積されて数マイルの位置のずれが出ることもありました。
この誤差を常時GPSで補正して極めて正確な航法を実現したのが現在の航法の主流であるFMS(Flight Management System)です。
ただRNAV経路を飛行する航空機には高性能の航法装置が必要となるためにこの航法装置を持たない小型機(自家用機や使用事業の飛行機)は昔ながらのVOR間の飛行を行っています。